
车辆路径问题(Vehicle Routing Problem,VRP)是一类经典的组合优化问题,涉及如何有效地分配一组车辆去访问多个客户点,并在满足约束条件的情况下最小化总行驶距离或成本。VRP在物流、配送、运输等领域有广泛的应用,以下是一些常见的VRP变体:
给定一组客户点、车辆容量、车辆数量、起始点和终点,目标是找到使得所有客户点都被访问一次的最短路径方案。 基本车辆路径问题(Vehicle Routing Problem,VRP)的数学模型可以使用整数线性规划(Integer Linear Programming,ILP)来表示。以下是一个简化的VRP模型示例:
参数:
变量:
目标函数:
最小化总行驶距离或成本: 约束条件:
2.每辆车的路径必须从起始点开始,并在终点结束:
3.Binary(0-1)约束:
该数学模型描述了不受容量约束的基本车辆路径问题(VRP)的数学规划形式,其中车辆可以无视容量限制,但仍需要找到使得总行驶距离或成本最小化的路径方案,以访问所有客户点。
与基本VRP类似,但每个客户点有一个特定的需求量,车辆需要满足总容量限制且在不超过容量的情况下为客户提供服务。
参数:
变量:
目标函数:
最小化总行驶距离或成本:
约束条件:
1.每个客户点必须被访问且仅被访问一次:
2.每辆车的路径必须从起始点开始,并在终点结束:
3.车辆容量限制:
4.Binary(0-1)约束:
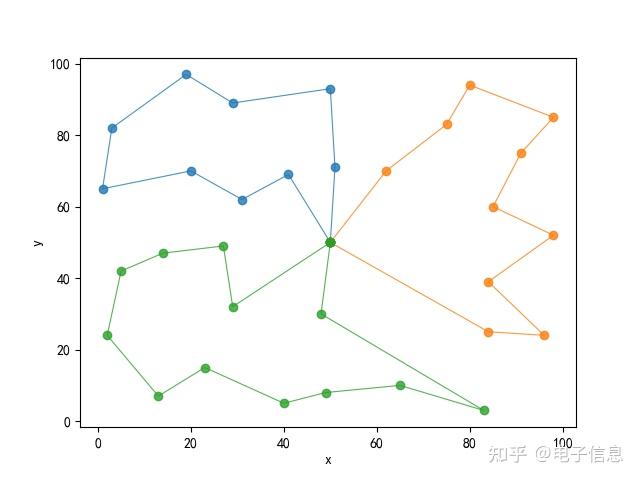
在CVRP中,问题的目标是找到一种车辆分配方案,使得每辆车都从一个起始点开始,途中访问一系列客户点,最终返回起始点。
在基本VRP的基础上,每个客户点都有一个时间窗口,表示可以在某个时间范围内访问。目标是在满足时间窗口和车辆容量限制的情况下,最小化总行驶距离或成本。
参数:
变量:
目标函数:
最小化总行驶距离或成本:
约束条件:
2.每辆车的路径必须从起始点开始,并在终点结束:
3.车辆容量限制:
4.子路径位置约束:
该约束表示,如果车辆 从客户点
移动到客户点
,则到达客户点
的时间
必须早于到达客户点
的时间
5.时间窗口约束:
6.到达时间约束:
7.Binary(0-1)约束:
8.时间窗口和到达时间一致性:
该数学模型描述了车辆路径问题 with 时间窗口(VRP-TW)的数学规划形式,其中
是一个大正数,用于线性规划中的大M法(Big-M method)来实现条件约束。
允许不同类型的车辆存在,每种类型的车辆有不同的容量和成本,目标是最小化总成本。HVRP的主要特点在于它允许在同一个问题中考虑多种不同类型的车辆,这些车辆可以有不同的容量、速度、成本等属性。因此,在解决HVRP时,需要考虑以下几个方面:
车辆类型: 不同类型的车辆可能有不同的特点,如不同的容量限制、速度和成本。这些属性需要在问题中明确指定。
客户点需求: 每个客户点可能需要不同数量的货物,而不同类型的车辆可以承载不同数量的货物。因此,需要确保分配到每个客户点的车辆类型满足其需求。
成本和效率: 由于不同类型的车辆有不同的成本和速度,需要综合考虑成本和效率来优化路线分配。
路径优化: 在HVRP中,需要找到一种分配方案,使得每个客户点都得到服务,同时最小化总行驶距离或成本。涉及到路径规划和车辆调度的问题。
数学建模: 针对HVRP,需要建立适当的数学模型,考虑车辆类型、容量约束、时间窗口等因素,将问题转化为数学规划问题。混合两类车辆路径问题建模的示例如下:
参数:
变量:
目标函数:
最小化总行驶时间或成本:
约束条件: 与标准的车辆路径问题类似,需要考虑每个客户点的访问次数、每辆车的起始和终止、容量限制、路径位置约束、时间窗口约束以及到达时间约束等。
补充约束: 对于不同类型的车辆,还需要引入适用于容量和速度的额外约束,以确保每种车辆类型的限制得到满足。在车辆路径问题中,可以根据具体的应用场景和问题描述,将速度 纳入到路径成本的计算中。一般来说,路径成本可以用以下方式表示:
这个简化的数学模型描述了混合车辆路径问题的基本结构,其中涵盖了两种不同类型的车辆。实际问题中,还可能涉及更多车辆类型和复杂的约束。解决HVRP需要根据问题的具体特点进行模型建立和求解方法的选择。
考虑多个冲突的目标,如最小化总行驶距离和最小化总成本。多目标车辆路径问题(Multi-Objective Vehicle Routing Problem,MOVRP)是车辆路径问题的一种变体,其主要特点是在优化过程中考虑多个目标函数,而不仅仅是单一的目标。MOVRP涉及在满足车辆容量和其他约束条件的前提下,同时优化多个不同的目标,如最小化总行驶距离、最小化总成本、最小化车辆数量等。
MOVRP的主要挑战在于寻找一种解决方案,能够在多个不同目标之间找到一个平衡,并得到一组最优或非劣解(Pareto最优解)。这些解代表了在多个目标之间的权衡选择,没有一个解在所有目标上都优于其他解。
解决MOVRP的方法包括:
多目标优化算法: 一些专门针对多目标问题的优化算法可以应用于MOVRP,例如多目标遗传算法、多目标粒子群算法、多目标模拟退火等。这些算法能够搜索并生成一组不同权衡的解。
权衡法: 在某些情况下,可以使用权衡法来将多个目标函数线性组合成单一的目标函数,然后将问题转化为单一目标优化问题。这样可以使用单目标优化方法求解,但需要根据问题的需求和权重设置来确定适当的组合。
非劣排序: 对于MOVRP,非劣排序技术可以用来识别和维护一组非劣解。通过比较解集中的不同解,可以构建出帕累托前沿,即一组在不同目标下都无法进一步优化的解。
参考点方法: 这种方法将目标函数的值转化为相对于某个参考点的偏离程度,从而将多目标问题转化为单一目标问题。
多目标车辆路径问题(Multi-Objective Vehicle Routing Problem,MOVRP)的数学建模可以通过引入多个目标函数来表示。
以下是一个简化的MOVRP数学模型示例,假设有两个目标函数:最小化总行驶距离和最小化总成本。实际问题中可以根据需要添加更多的目标函数。
参数:
变量:
目标函数:
最小化多个目标函数的加权和:
其中 "成本相关项" 表示成本与路径相关的函数,例如基于距离、时间、车辆类型等的成本计算。
约束条件:
2.每辆车的路径必须从起始点开始,并在终点结束:
3.车辆容量限制:
4.子路径位置约束:
该约束表示,如果车辆 从客户点
移动到客户点
,则到达客户点
的时间
必须早于到达客户点
的时间
5.时间窗口约束:
6.到达时间约束:
7.Binary(0-1)约束:
8.时间窗口和到达时间一致性:
该模型中,通过引入权重因子
和
,可以对行驶距离和成本进行权衡。该模型描述了多目标车辆路径问题,可以根据问题的具体要求进行扩展和调整。
考虑客户点的需求和位置在不断变化的情况下,实时地规划车辆路径。动态车辆路径问题(Dynamic Vehicle Routing Problem,DVRP)是车辆路径问题的一种变体,考虑了实时变化的情况,其中客户需求和路况随着时间的推移而发生变化。与传统的车辆路径问题不同,DVRP要求在已经开始执行路线的情况下,根据实时信息和变化的需求进行实时的路径优化调整。
DVRP的主要特点包括:
动态需求: 客户的需求在运输过程中可能发生变化,例如有新的客户加入、已有客户的需求发生变化等。
实时信息: 路况可能随着时间的推移而发生变化,交通堵塞或道路封闭可能会影响路径选择。
即时调整: 在DVRP中,需要根据实时信息对已经计划好的路径进行调整,以适应变化的需求和路况。
决策时机: 在DVRP中,需要决定何时对路径进行调整,以在满足约束条件的情况下优化路径。
以下是一个简化的DVRP数学模型,用于描述问题的基本结构。实际问题中可能更为复杂,需要根据实际情况进行扩展和调整。
参数:
变量:
目标函数: DVRP通常需要在实时情况下进行路径调整,因此目标函数可能涉及路径成本和需求变化的成本等。
约束条件:
2.每辆车的路径必须从起始点开始,并在终点结束:
3.车辆容量限制:
4.子路径位置约束:
该约束表示,如果车辆 从客户点
移动到客户点
,则到达客户点
的时间
必须早于到达客户点
的时间
5.时间窗口约束:
6.实时到达时间约束:
7.Binary(0-1)约束:
8.时间窗口和实时到达时间一致性:
该模型中,实时信息和需求变化通过实时距离
体现,而目标函数和约束条件的形式则取决于问题的具体情况。这是一个简化的数学模型,实际问题中需要考虑更多的因素和约束条件。
数学建模中,通常使用大M法(Big-M method)来表示条件约束,其中 是一个大正数,用于将条件约束转化为线性规划中的约束。
的取值需要根据具体问题的特点和约束来确定,它应该足够大以确保约束在问题的可行解范围内成立,但又不能太大以避免对最优解产生影响。
在上述数学模型中, 出现在实际到达时间约束的部分,其中用于确保约束在某些条件下成立。在这个情境中,
的取值应该足够大,以确保约束不会受到实际到达时间的限制,从而使该约束对优化问题没有影响。
具体来说, 的取值应该满足以下两个条件:
(1) 应该足够大,以确保
这个约束在所有情况下成立。也就是说,无论实际到达时间
和
是多少,以及路径之间的距离
是多少,约束都不会被违反。
(2)同时, 不应该过大,以避免对最优解产生不必要的影响。过大的
值可能会导致线性规划问题的数值稳定性问题或求解困难。
在实际应用中,通常需要根据问题的规模和特点,通过经验或分析来确定合适的 值。选取适当的
值是数学建模中的一个关键环节,需要在保证约束成立的前提下,尽可能减小
对问题求解的影响。


 微信二维码
微信二维码